

Digital bathymetric model fusion of offshore waters around China’s coastline based on global bathymetry data
-
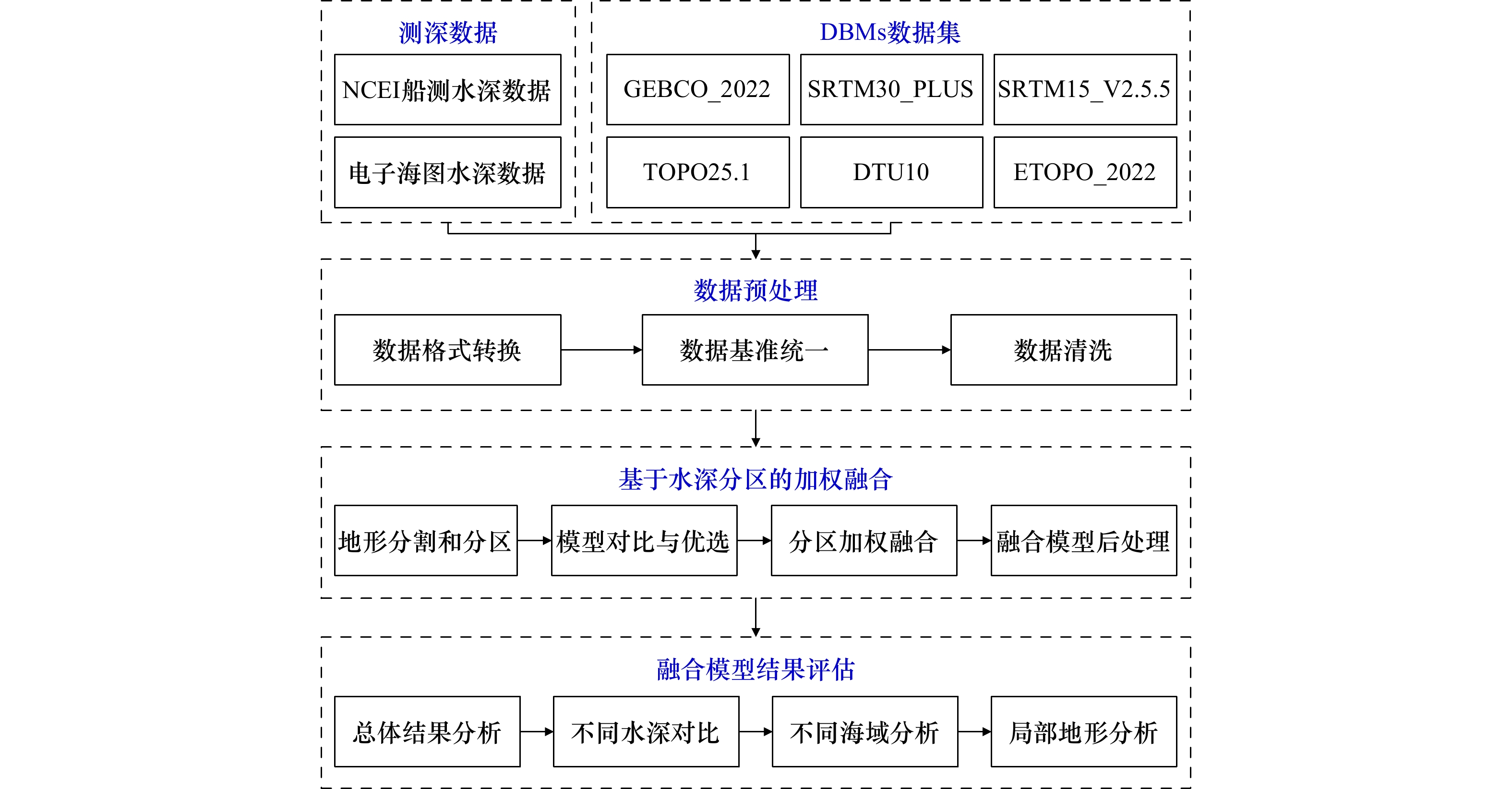
摘要: 数字水深模型(Digital Bathymetric Models,简称“DBMs”),是近海工程建设、资源开发、环境保护等领域的重要基础地理信息数据。现有全球公开DBMs产品如GEBCO(The General Bathymetric Chart of the Oceans)、SRTM(The Shuttle Radar Topography Mission)、ETOPO(Earth Topography)等在不同海域的数据类型、数据来源和产品精度均存在差异。为利用全球测深数据和DBMs产品重建中国近海水深模型,本文提出一种基于水深分区的加权融合重建框架。首先,从5个维度(整体精度、不同水深、航线剖面、地理分区、局部细节)对比分析6种常用DBMs产品的可靠性和适用性;然后,顾及水深和地形特征对研究区进行分割和分区,并选取分区内最优DBMs产品,以最小误差为约束进行最优加权融合;最后,对融合结果进行实测值恢复、平滑滤波等后处理,形成中国海岸线周边近海海域15″分辨率高精度无缝水深模型。结果表明,融合结果相比SRTM30_PLUS、GEBCO_2022、SRTM15_V2.5.5和ETOPO_2022均方根误差降低了27%、14%、14%和13%,地形细节也得到保留,证明了该融合框架的可行性,可为多数据集大规模海底地形的融合重建和及时更新提供参考。Abstract: Digital bathymetric models (DBMs) are important basic geographic information data in the fields of offshore engineering construction, resource development, environmental protection and so on. The existing global public DBMs products such as GEBCO (The General Bathymetric Chart of the Oceans), SRTM (The Shuttle Radar Topography Mission) and ETOPO (Earth Topography) have different data types, data sources and product accuracy in different sea areas. In order to reconstruct China’s offshore bathymetric model using global bathymetric data and DBMs products, this paper proposed a weighted fusion reconstruction framework based on bathymetric partition. Firstly, the reliability and applicability of six commonly used DBMs products (GEBCO_2022, SRTM30_PLUS, SRTM15_V2.5.5, TOPO_25.1, DTU10, ETOPO_2022) were compared and analyzed in five dimensions (overall accuracy, different water depths, route profiles, geographical partitions, local details). Then, considering the bathymetric and topographic characteristics, the study area was segmented and partitioned, and the optimal DBMs products in the partition were selected, and the optimal weighted fusion was carried out with the minimum error as the constraint. Finally, the fusion results were processed by measured value recovery, smooth filtering and other post-processing to form a high-precision seamless bathymetric model with 15" resolution in offshore waters around China’s coastline. The results showed that the RMSE of the fusion results was reduced by 27%, 14%, 14% and 13% compared with SRTM30_PLUS, GEBCO_2022, SRTM15_V2.5.5 and ETOPO_2022, and the details of the topograhy were also retained. The feasibility of the fusion framework was proved, which could provide a reference for the fusion reconstruction and timely updating of large-scale seabed topography from multiple datasets.
-

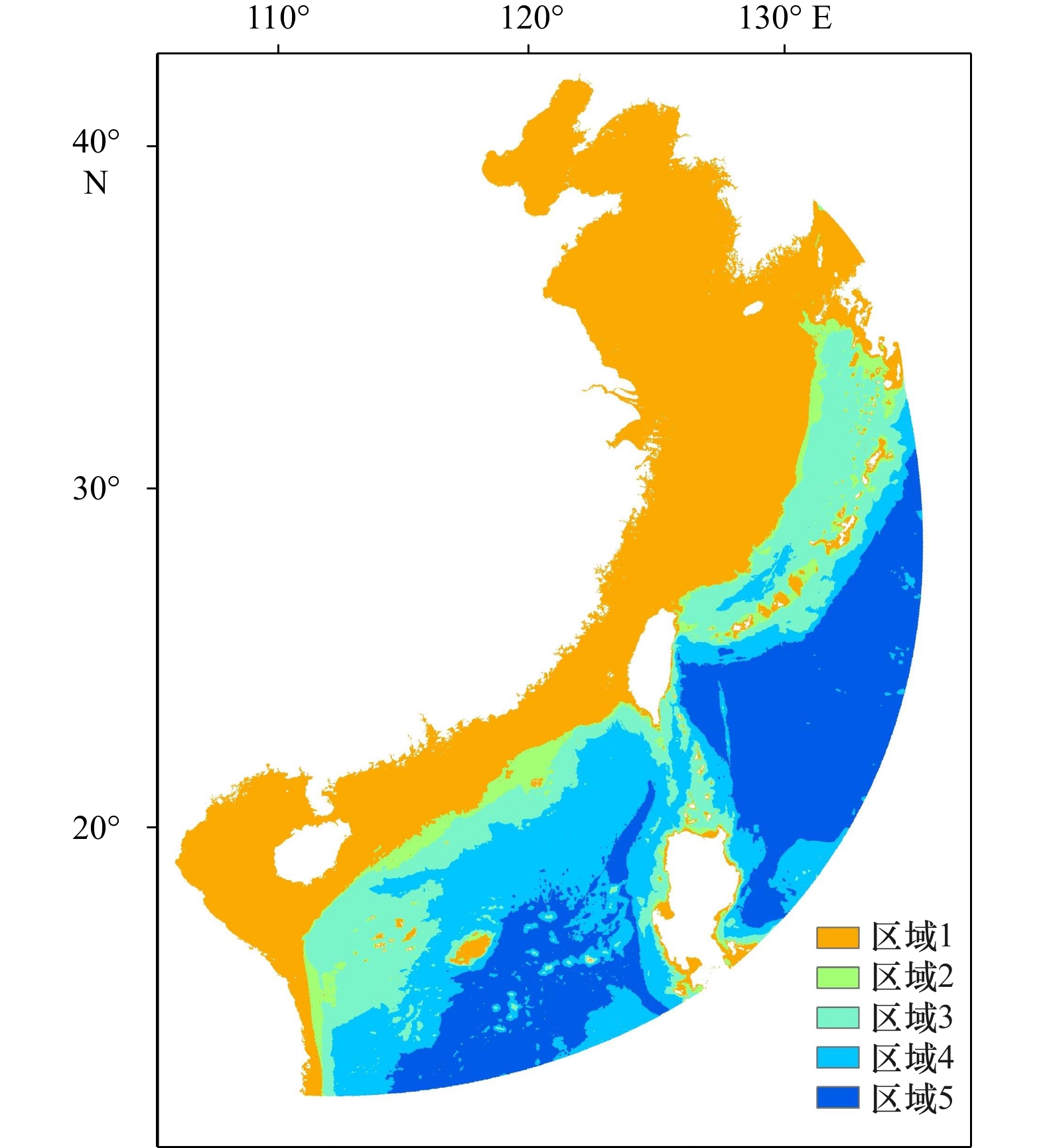
图 1 a. 研究区;b. 测深数据分布
该图基于自然资源部标准地图服务网站下载的审图号为GS(2019)1822号的标准地图制作,底图无修改
Fig. 1 a. Study area ; b. distribution of bathymetry data
Note: The map is produced based on the standard map with review number GS (2019) 1822 downloaded from the website of the Standard Map Service of the Ministry of Natural Resources of the People’s Republic of China, with no modifications to the base map
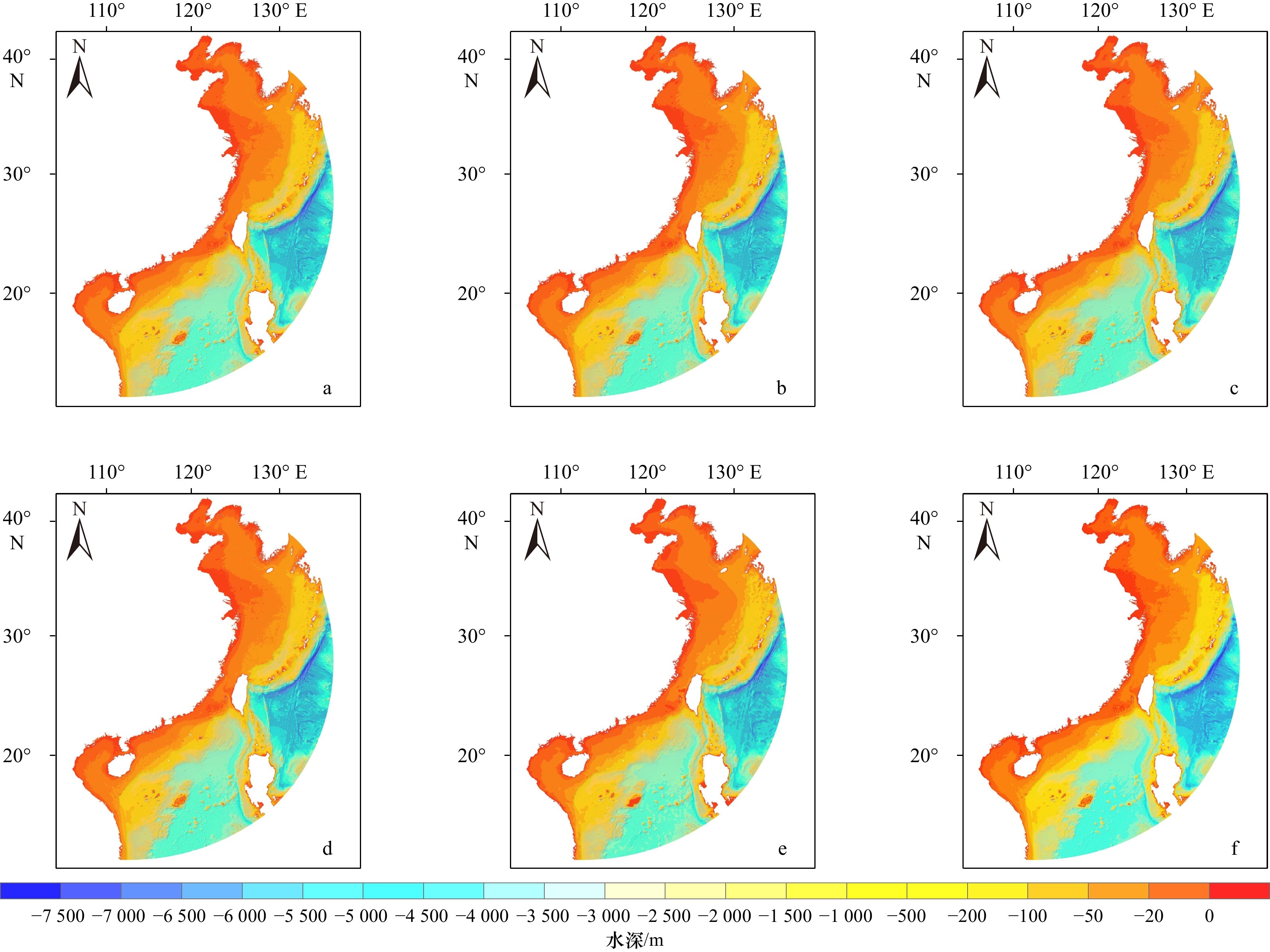
图 2 研究区DBMs. a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022
Fig. 2 DBMs in the study area. a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022

图 4 NCEI船测水深数据可靠性验证
Fig. 4 Reliability verification of NCEI ship-measured bathymetry data

图 7 模型融合后处理
a. 15″×15″水深栅格;b. 镶嵌栅格;c. 邻域统计结果;d. 最终融合结果
Fig. 7 Post-processing of model fusion
a. 15″×15″ bathymetric raster; b. mosaiced raster; c. neighbourhood statistics results; d. final fusion result
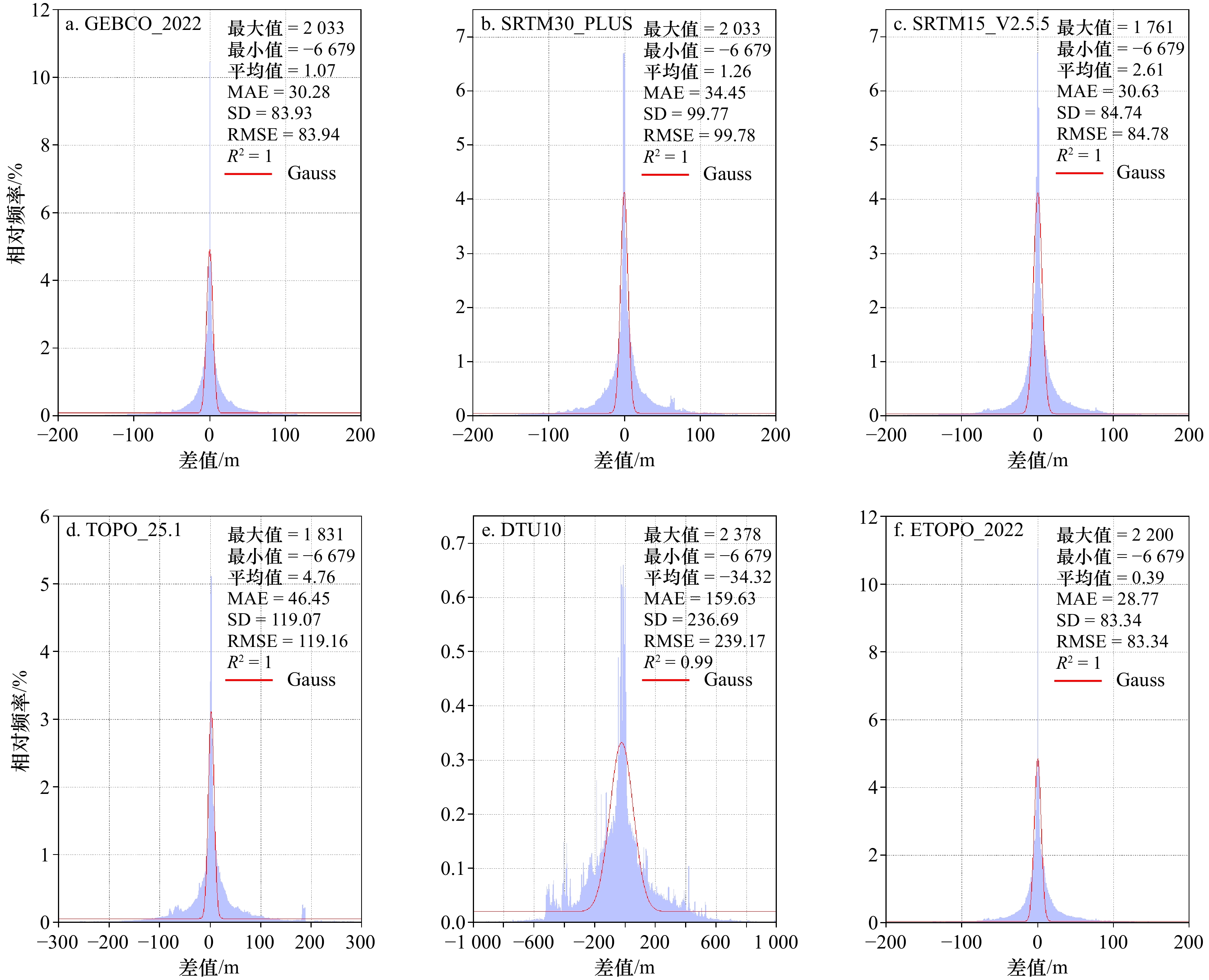
图 8 DBMs与实测水深值的误差分布
正值表示 DBM 水深比实测值浅,a. GEBCO_2022;b. SRTM30_PLUS;c. SRTM15_V2.5.5;d. TOPO_25.1;e. DTU10;f. ETOPO_2022
Fig. 8 Distribution of differences bteween DBMs and measured bathymetry values
A positive value indicates that the DBM bathymetry is shallower than that of the measured values, a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022

图 9 航线分析
a. 航线位置;b.
25874 航线剖面;c. EW9509航线剖面(黑点代表实测水深)Fig. 9 Route analysis
a. Route location; b. profile route
25874 ; c. profile route EW9509 (the black spots represent measured bathymetry)
图 10 融合结果
a. 融合模型可视化;b. 融合模型整体精度评估
Fig. 10 Fusion results
a. Fusion model visualization; b. overall accuracy evaluation of fusion model
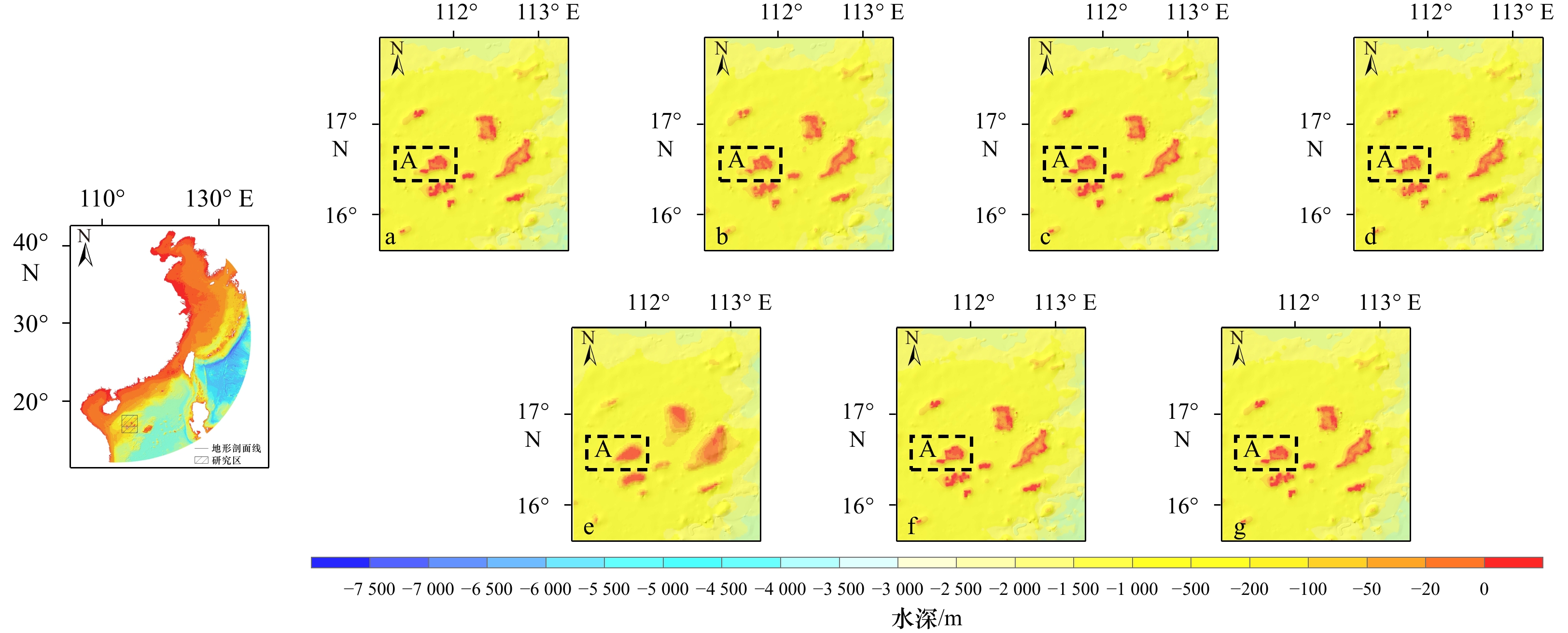
图 12 西沙群岛结果验证
a. GEBCO_2022;b. SRTM30_PLUS;c. SRTM15_V2.5.5;d. TOPO_25.1;e. DTU10;f. ETOPO_2022;g. 融合模型
Fig. 12 The result verification of Xisha Islands
a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022; g. Fusion model
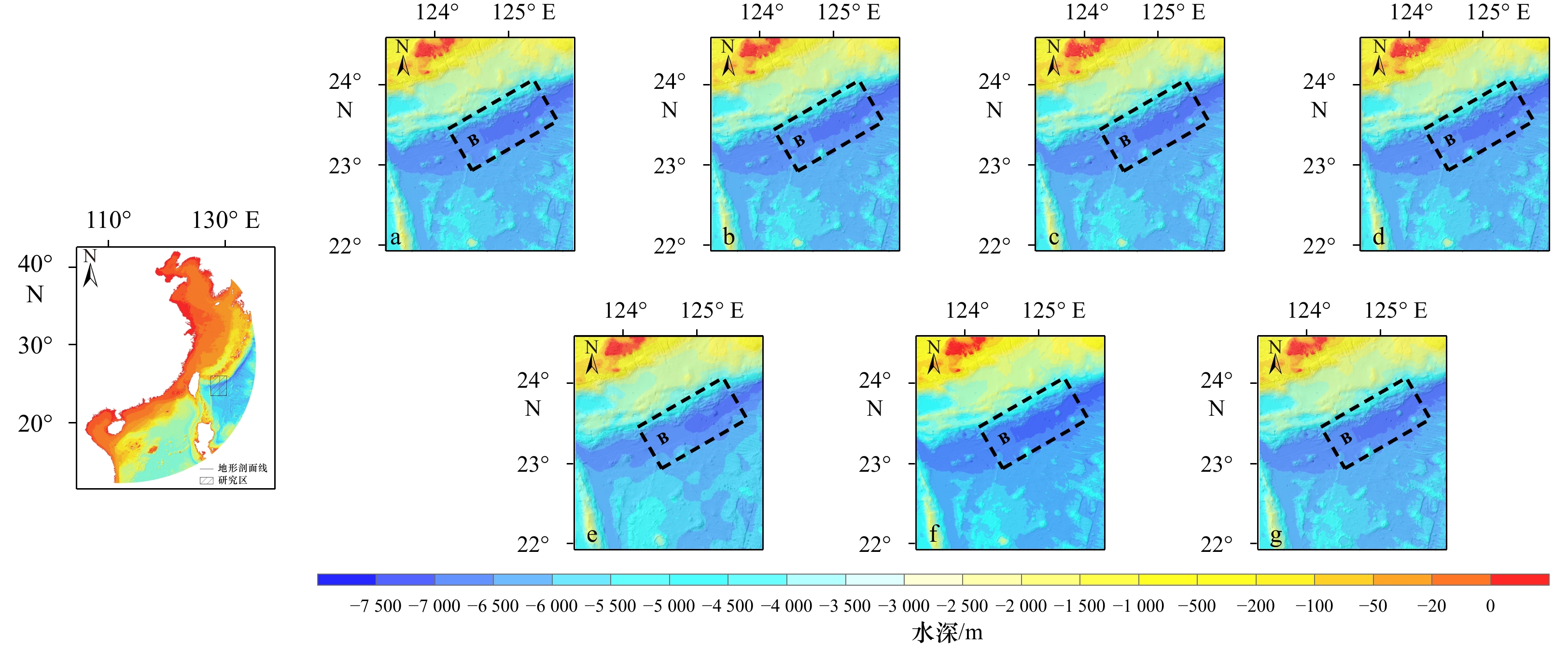
图 13 琉球群岛结果验证
a. GEBCO_2022;b. SRTM30_PLUS;c. SRTM15_V2.5.5;d. TOPO_25.1;e. DTU10;f. ETOPO_2022;g. 融合模型
Fig. 13 The result verification of Ryukyu Islands
a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022; g. Fusion model

图 14 西沙群岛局部剖面
a. GEBCO_2022;b. SRTM30_PLUS;c. SRTM15_V2.5.5;d. TOPO_25.1;e. DTU10;f. ETOPO_2022;g. 融合模型
Fig. 14 Local section of Xisha Islands
a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022; g. Fusion model
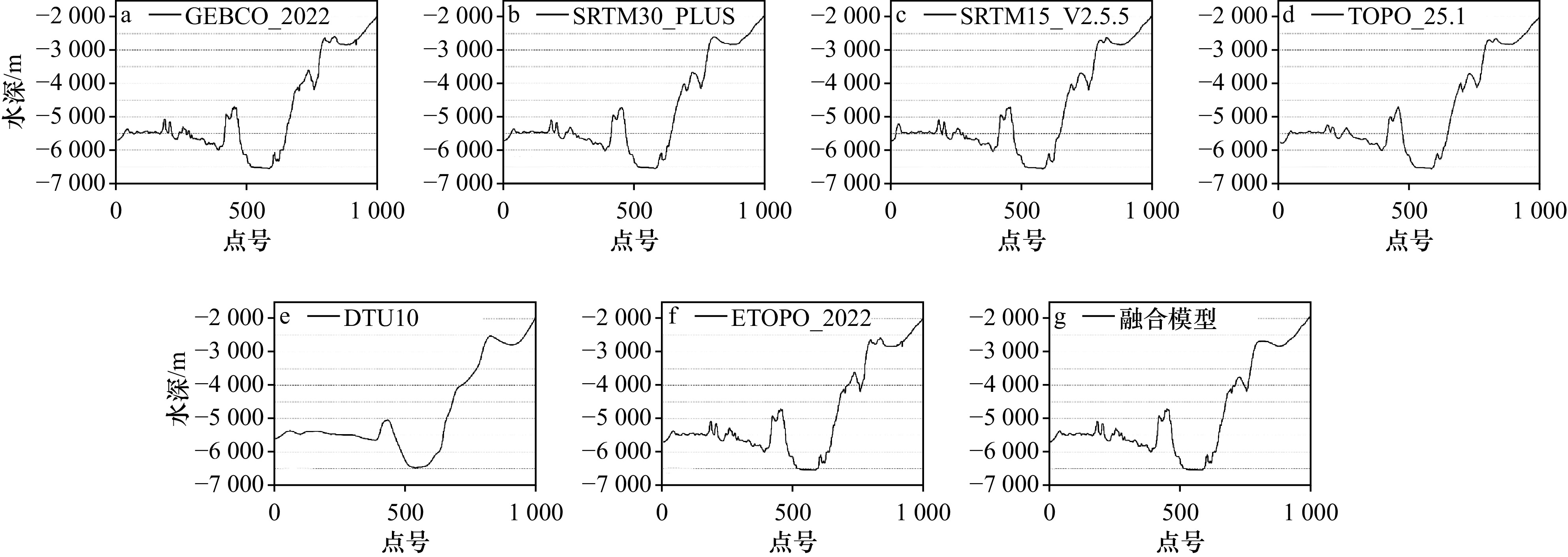
图 15 琉球群岛局部剖面
a. GEBCO_2022;b. SRTM30_PLUS;c. SRTM15_V2.5.5;d. TOPO_25.1;e. DTU10;f. ETOPO_2022;g. 融合模型
Fig. 15 Local section of Ryukyu Islands
a. GEBCO_2022; b. SRTM30_PLUS; c. SRTM15_V2.5.5; d. TOPO_25.1; e. DTU10; f. ETOPO_2022; g. Fusion model
表 1 DBMs数据集概况
Tab. 1 An overview of DBMs datasets
数据集 更新时间 组织机构 国家 分辨率 空间范围 水平基准垂直基准 数据来源 GEBCO_2022 2022 The Nippon
Foundation-
GEBCOUK-Japan 15″ 179° 59' 52.5"W~0°
179° 59' 52.5"E;
89° 59' 52.5''N~
89° 59' 52.5''SWGS84 MSL https://download.gebco.net/ SRTM30_PLUS 2014 SIO USA 30″ 经度180°~0°~180°;
90°N~90°SWGS84 MSL https://topex.ucsd.edu/pub/srtm30_plus/srtm30/grd/ SRTM15_V2.5.5 2023 SIO USA 15″ 经度180°~0°~180°;
90°N~90°SWGS84 MSL https://topex.ucsd.edu/pub/srtm15_plus/ TOPO_25.1 2023 SIO USA 1' 经度180°~0°~180°;
90°N~90°SWGS84 MSL https://topex.ucsd.edu/pub/global_topo_1min/ DTU10 2010 DTU Space Denmark 1' 经度180°~0°~180°;
90°N~90°SWGS84 MSL https://ftp.space.dtu.dk/pub/DTU10/1_MIN/ ETOPO_2022 2023 NCEI USA 15″ 经度180°~0°~180°;
90°N~90°SWGS84 MSL https://www.ncei.noaa.gov/products/etopo-global-relief-model/  下载: 导出CSV
下载: 导出CSV
表 2 NCEI船测水深数据与DBMs的空间相关矩阵
Tab. 2 The spatial correlation matrix between NCEI ship-measured bathymetry data and DBMs
船测水深 GEBCO_2022 SRTM30_PLUS SRTM15_V2.5.5 TOPO_25.1 DTU10 ETOPO_2022 船测水深 1 0.9990 0.9986 0.9990 0.9980 0.9920 0.9990 GEBCO_2022 0.9990 1 0.9993 0.9996 0.9986 0.9925 0.9998 SRTM30_PLUS 0.9986 0.9993 1 0.9992 0.9991 0.9928 0.9991 SRTM15_V2.5.5 0.9990 0.9996 0.9992 1 0.9987 0.9924 0.9996 TOPO_25.1 0.9980 0.9986 0.9991 0.9987 1 0.9933 0.9985 DTU10 0.9920 0.9925 0.9928 0.9924 0.9933 1 0.9924 ETOPO_2022 0.9990 0.9998 0.9991 0.9996 0.9985 0.9924 1
下载: 导出CSV
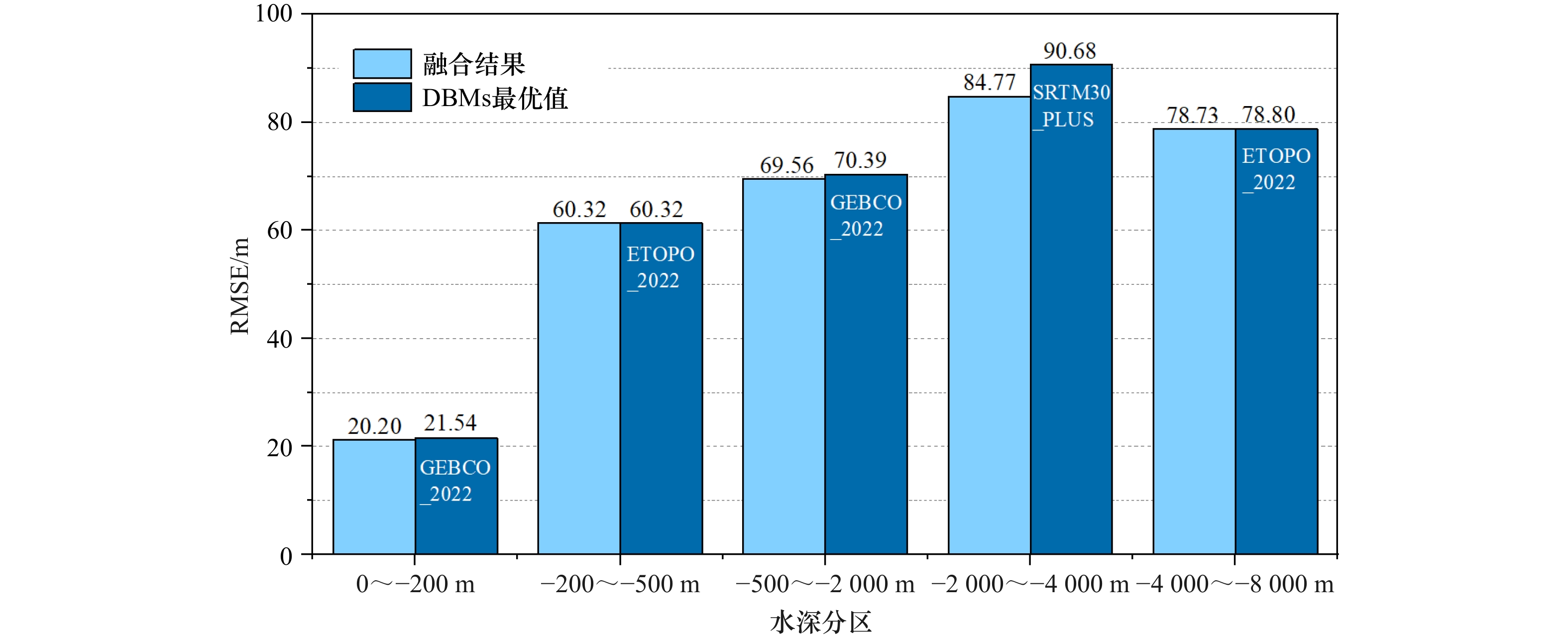
表 3 最优融合权重分配表
Tab. 3 Distribution table for the optimal fusion weights
水深/m RMSE(m) 权重分配 融合前 融合后 GEBCO_2022 ETOPO_2022 SRTM15_V2.5.5 0~−200 20.324 20.130 0.1 0.9 0 −200~−500 61.327 61.325 0.1 0.9 0 −500~− 2000 70.394 69.563 0.1 0.9 0 − 2000 ~−4000 90.683 84.767 0.5 0 0.5 − 4000 ~−8000 78.804 78.730 0.2 0.8 0
下载: 导出CSV
表 4 不同海域融合前后精度对比
Tab. 4 Accuracy comparison before and after fusion of different sea areas
地理分区 精度/m R2 最大值 最小值 平均值 MAE SD RMSE 黄海 融合前 795.88 −66.64 0.18 1.33 9.19 9.22 0.99 融合后 675.91 −92.17 0.11 1.27 7.59 7.59 0.99 南海 融合前 949.08 −948.11 0.09 31.34 86.42 86.42 0.93 融合后 3601.89 − 1056.83 1.07 20.88 65.20 65.21 0.98 东海 融合前 1180.18 −949.14 −1.40 26.94 67.02 67.04 0.89 融合后 1196.48 − 1522.43 −0.56 24.77 61.46 61.46 0.93
下载: 导出CSV
-
[1] Sandwell D T, Müller R D, Smith W H F, et al. New global marine gravity model from CryoSat-2 and Jason-1 reveals buried tectonic structure[J]. Science, 2014, 346(6205): 65−67. doi: 10.1126/science.1258213 [2] 吴园涛, 段晓男, 沈刚, 等. 强化我国海洋领域国家战略科技力量的思考与建议[J]. 地球科学进展, 2021, 36(4): 413−420. doi: 10.11867/j.issn.1001-8166.2021.039Wu Yuantao, Duan Xiaonan, Shen Gang, et al. Thoughts and suggestions on strengthening the national strategic scientific and technological forces in the marine field of China[J]. Advances in Earth Science, 2021, 36(4): 413−420. doi: 10.11867/j.issn.1001-8166.2021.039 [3] 张继红, 方建光, 唐启升. 中国浅海贝藻养殖对海洋碳循环的贡献[J]. 地球科学进展, 2005, 20(3): 359−365. doi: 10.3321/j.issn:1001-8166.2005.03.014Zhang Jihong, Fang Jianguang, Tang Qisheng. The contribution of shellfish and seaweed mariculture in China to the carbon cycle of coastal ecosystem[J]. Advances in Earth Science, 2005, 20(3): 359−365. doi: 10.3321/j.issn:1001-8166.2005.03.014 [4] 陈义兰, 唐秋华, 刘晓瑜, 等. 多源水深数据融合的近海数字水深模型构建[J]. 海洋科学进展, 2021, 39(3): 461−469. doi: 10.3969/j.issn.1671-6647.2021.03.012Chen Yilan, Tang Qiuhua, Liu Xiaoyu, et al. Construction of offshore digital bathymetric model based on multi-source bathymetric data fusion[J]. Advances in Marine Science, 2021, 39(3): 461−469. doi: 10.3969/j.issn.1671-6647.2021.03.012 [5] Ruan Xiaoguang, Cheng Liang, Chu Sensen, et al. A new digital bathymetric model of the South China Sea based on the subregional fusion of seven global seafloor topography products[J]. Geomorphology, 2020, 370: 107403. doi: 10.1016/j.geomorph.2020.107403 [6] 董箭, 彭认灿, 张立华, 等. 滚动球变换的数字水深模型多尺度表达[J]. 地球信息科学学报, 2012, 14(6): 704−711. doi: 10.3724/SP.J.1047.2012.00704Dong Jian, Peng Rencan, Zhang Lihua, et al. Multi-scale representation of digital depth model based on rolling ball transform[J]. Journal of Geo-information Science, 2012, 14(6): 704−711. doi: 10.3724/SP.J.1047.2012.00704 [7] 阳凡林, 沈瑞杰, 梅赛, 等. 联合重力异常和重力垂直梯度异常数据反演皇帝山海域海底地形[J]. 海洋学报, 2022, 44(12): 126−135.Yang Fanlin, Shen Ruijie, Mei Sai, et al. Inversion of seafloor topography in Emperor Seamount sea area by combined gravity anomalies and vertical gravity gradient anomalies data[J]. Haiyang Xuebao, 2022, 44(12): 126−135. [8] Weatherall P, Marks K M, Jakobsson M, et al. A new digital bathymetric model of the world's oceans[J]. Earth and Space Science, 2015, 2(8): 331−345. doi: 10.1002/2015EA000107 [9] Becker J J, Sandwell D T, Smith W H F, et al. Global bathymetry and elevation data at 30 arc seconds resolution: SRTM30_PLUS[J]. Marine Geodesy, 2009, 32(4): 355−371. doi: 10.1080/01490410903297766 [10] Fan Diao, Li Shanshan, Feng Jinkai, et al. A new global bathymetry model: STO_IEU2020[J]. Remote Sensing, 2022, 14(22): 5744. doi: 10.3390/rs14225744 [11] Leon J X, Phinn S R, Hamylton S, et al. Filling the ‘white ribbon’ – a multisource seamless digital elevation model for Lizard Island, northern Great Barrier Reef[J]. International Journal of Remote Sensing, 2013, 34(18): 6337−6354. doi: 10.1080/01431161.2013.800659 [12] Tozer B, Sandwell D T, Smith W H F, et al. Global bathymetry and topography at 15 arc sec: SRTM15+[J]. Earth and Space Science, 2019, 6(10): 1847−1864. doi: 10.1029/2019ea000658 [13] 刘洋, 吴自银, 赵荻能, 等. MF多源测深数据融合方法及大洋水深模型构建[J]. 测绘学报, 2019, 48(9): 1171−1181. doi: 10.11947/j.AGCS.2019.20180495Liu Yang, Wu Ziyin, Zhao Dineng, et al. The MF method for multi-source bathymetric data fusion and ocean bathymetric model construction[J]. Acta Geodaetica et Cartographica Sinica, 2019, 48(9): 1171−1181. doi: 10.11947/j.AGCS.2019.20180495 [14] Okolie C J, Smit J L. A systematic review and meta-analysis of digital elevation model (DEM) fusion: pre-processing, methods and applications[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2022, 188: 1−29. doi: 10.1016/j.isprsjprs.2022.03.016 [15] 岳林蔚, 沈焕锋, 袁强强, 等. 基于深度置信网络的多源DEM点面融合模型[J]. 武汉大学学报(信息科学版), 2021, 46(7): 1090−1097.Yue Linwei, Shen Huanfeng, Yuan Qiangqiang, et al. A multi-source DEM point-surface fusion model based on deep belief network[J]. Geomatics and Information Science of Wuhan University, 2021, 46(7): 1090−1097. [16] Guan Liyi, Hu Jun, Pan Hongbo, et al. Fusion of public DEMs based on sparse representation and adaptive regularization variation model[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 169: 125−134. doi: 10.1016/j.isprsjprs.2020.09.005 [17] Wessel P. Tools for analyzing intersecting tracks: the x2sys package[J]. Computers & Geosciences, 2010, 36(3): 348−354. doi: 10.1016/j.cageo.2009.05.009 [18] Tunalioglu N, Ocalan T, Dogan A H. Precise point positioning with GNSS raw measurements from an Android smartphone in marine environment monitoring[J]. Marine Geodesy, 2022, 45(3): 274−294. doi: 10.1080/01490419.2022.2027831 -


计量
- 文章访问数: 657
- HTML全文浏览量: 228
- PDF下载量: 48
- 被引次数: 0
