

Iterative correction method of beam incident angle for ultra-short baseline underwater acoustic positioning
-
摘要: 海水介质的不均匀性导致声波传播过程会产生折射效应,采用平面声基阵的超短基线系统在测量过程中会受到该现象的影响,从而使测量结果产生较大的误差,通常采用声线跟踪的方法利用实测声速剖面进行声线修正。准确的波束入射角是确保声线跟踪精度的前提,超短基线系统是利用声学相位差推算得到近似波束入射角,而利用近似波束入射角进行声线跟踪会造成一定的精度损失。针对上述问题,本文提出了一种超短基线水声定位的波束入射角迭代修正方法,基于常梯度声线跟踪构建起了波束入射角与传播时间的迭代计算关系,采用埃特金加速法实现了波束入射角的非线性方程快速解算。通过仿真实验证明本文提出方法能够实现波束入射角与目标位置的准确计算,有效消除了折射效应对超短基线水下定位的影响。Abstract: The inhomogeneity of the seawater medium causes the refraction effect in the sound wave propagation process. The ultra-short baseline system using the planar acoustic array will be affected by this phenomenon during the measurement process, which will cause large errors in the measurement results. The sound ray tracking method is usually used to correct the sound ray by using the measured sound velocity profile. Accurate beam incident angle is the prerequisite to ensure the accuracy of sound ray tracking, but the ultra-short baseline system does not directly measure the beam incident angle but uses the approximate incident angle derived from the acoustic phase difference for sound ray tracking will cause a certain loss of accuracy. To solve the above problems, this paper proposes an iterative correction method of beam incidence angle for ultra-short baseline underwater acoustic positioning. Based on constant gradient acoustic ray tracking, the iterative calculation relationship between beam incidence angle and propagation time is constructed, the Aitken acceleration method is used to quickly solve the nonlinear equation of the beam incidence angle. Simulation experiments prove that the method proposed in this paper can accurately calculate the beam incident angle and target position, and effectively eliminate the influence of refraction effects on ultra-short baseline underwater positioning.
-
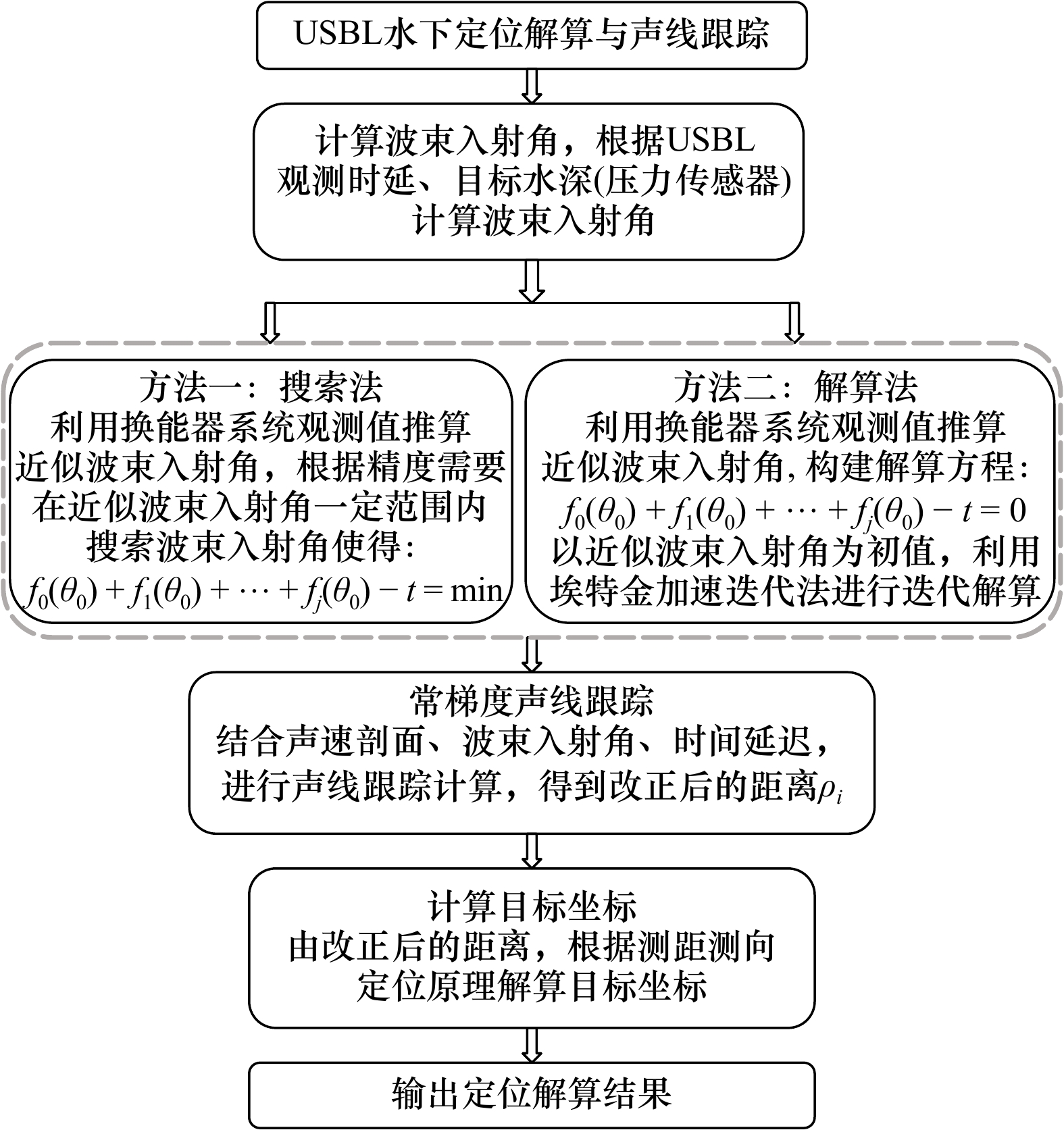
图 4 常梯度声线跟踪水下定位计算流程
Fig. 4 Calculation flow of constant gradient acoustic tracking underwater positioning
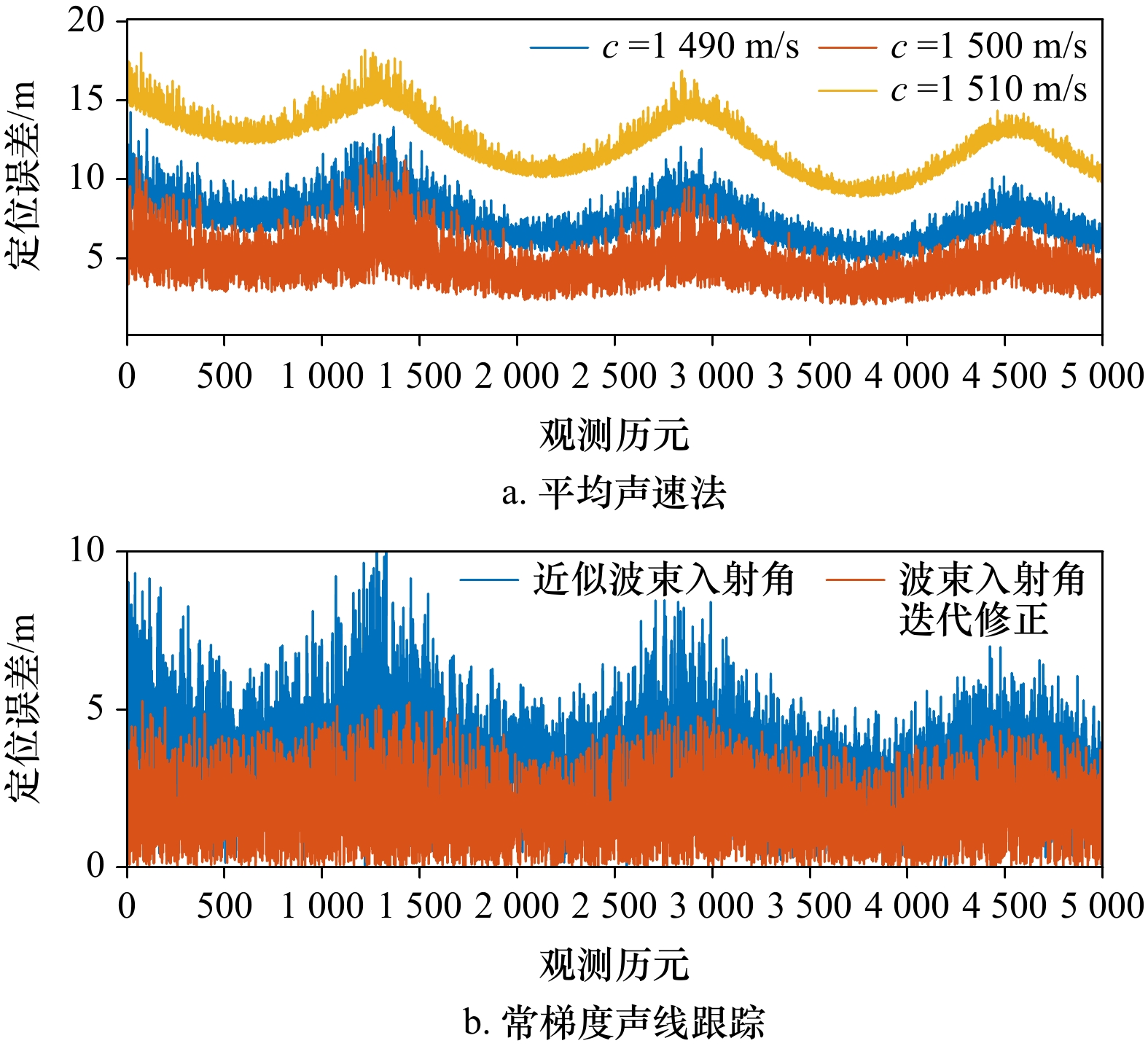
表 1 仿真结果统计表
Tab. 1 Statistical table of simulation results
计算方法 σx/m σy/m σp/m 计算时间/s 平均声速法(c = 1 490 m/s) 4.07 4.02 5.73 0.2 平均声速法(c = 1 500 m/s) 2.74 2.73 3.87 0.2 平均声速法(c = 1 510 m/s) 6.21 6.12 8.72 0.2 常梯度声线跟踪−
近似波束入射角法2.34 2.36 3.32 22.2 常梯度声线跟踪−
波束入射角搜索法1.49 1.49 2.11 980.1 常梯度声线跟踪−
波束入射角牛顿迭代法1.47 1.49 2.10 56.7 常梯度声线跟踪−
波束入射角埃特金加速迭代法1.47 1.49 2.10 13.9 注:σx为x方向定位标准差;σy为y方向定位标准差;σp为平面位置定位标准差。  下载: 导出CSV
下载: 导出CSV
-
[1] 孙大军, 郑翠娥, 张居成, 等. 水声定位导航技术的发展与展望[J]. 中国科学院院刊, 2019, 34(3): 331−338.Sun Dajun, Zheng Cuie, Zhang Jucheng, et al. Development and prospect for underwater acoustic positioning and navigation technology[J]. Bulletin of Chinese Academy of Sciences, 2019, 34(3): 331−338. [2] 杨元喜, 徐天河, 薛树强. 我国海洋大地测量基准与海洋导航技术研究进展与展望[J]. 测绘学报, 2017, 46(1): 1−8.Yang Yuanxi, Xu Tianhe, Xue Shuqiang. Progresses and prospects in developing marine geodetic datum and marine navigation of China[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(1): 1−8. [3] Spiess F N, Chadwell C D, Hildebrand J A, et al. Precise GPS/Acoustic positioning of seafloor reference points for tectonic studies[J]. Physics of the Earth and Planetary Interiors, 1998, 108(2): 101−112. doi: 10.1016/S0031-9201(98)00089-2 [4] Ballu V, Ammann J, Pot O, et al. A seafloor experiment to monitor vertical deformation at the Lucky Strike volcano, Mid-Atlantic Ridge[J]. Journal of Geodesy, 2009, 83(2): 14−159. [5] 阳凡林, 康志忠, 独知行, 等. 海洋导航定位技术及其应用与展望[J]. 海洋测绘, 2006, 26(1): 71−74.Yang Fanlin, Kang Zhizhong, Du Zhixing, et al. On the marine navigation positioning technology and its application and perspective[J]. Hydrographic Surveying and Charting, 2006, 26(1): 71−74. [6] Alcocer A, Oliveira P, Pascoal A. Underwater acoustic positioning systems based on buoys with GPS[C]//Proceedings of the 8th European Conference on Underwater Acoustics. Protugal: [s.n.], 2006. [7] Xin Mingzhen, Yang Fanlin, Liu Hui, et al. Single-difference dynamic positioning method for GNSS-acoustic intelligent buoys systems[J]. Journal of Navigation, 2020, 73(3): 646−657. doi: 10.1017/S0373463319000869 [8] 刘焱雄, 彭琳, 吴永亭, 等. 超短基线水声定位系统校准方法研究[J]. 武汉大学学报: 信息科学版, 2006, 31(7): 610−612.Liu Yanxiong, Peng Lin, Wu Yongting, et al. Calibration of transducer and transponder positions[J]. Geomatics and Information Science of Wuhan University, 2006, 31(7): 610−612. [9] 宁津生, 吴永亭, 孙大军. 长基线声学定位系统发展现状及其应用[J]. 海洋测绘, 2014, 34(1): 72−75. doi: 10.3969/j.issn.1671-3044.2014.01.021Ning Jinsheng, Wu Yongting, Sun Dajun. The development of LBL acoustic positioning system and its application[J]. Hydrographic Surveying and Charting, 2014, 34(1): 72−75. doi: 10.3969/j.issn.1671-3044.2014.01.021 [10] 吴永亭. LBL精密定位理论方法研究及软件系统研制[D]. 武汉: 武汉大学, 2013: 12-21.Wu Yongting. Study on theory and method of precise LBL positioning and development of positioning software system[D]. Wuhan: Wuhan University, 2013: 12−21. [11] 李海鹏, 韩云峰, 郑翠娥. 声速修正技术在高精度水下定位系统中的应用[J]. 导航定位学报, 2020, 8(3): 47−52. doi: 10.3969/j.issn.2095-4999.2020.03.007Li Haipeng, Han Yunfeng, Zheng Cuie. Application of sound speed correction technology in highly precise underwater positioning system[J]. Journal of Navigation and Positioning, 2020, 8(3): 47−52. doi: 10.3969/j.issn.2095-4999.2020.03.007 [12] 郑翠娥. 超短基线定位技术在水下潜器对接中的应用研究[D]. 哈尔滨: 哈尔滨工程大学, 2008: 14-52.Zheng Cuie. Application of USBL positioning technology on underwater submersible interfacing[D]. Harbin: Harbin Engineering University, 2008: 14−52. [13] 韩瑞宁. 超短基线定位精度的改进方法研究[D]. 青岛: 中国海洋大学, 2007: 5-19.Han Ruining. The research of improved method for ultra short baseline position precision[D]. Qingdao: Ocean University of China, 2007: 5−19. [14] 喻敏. 长程超短基线定位系统研制[D]. 哈尔滨: 哈尔滨工程大学, 2006: 32-47.Yu Min. Research on long range utral short baseline system[D]. Harbin: Harbin Engineering University, 2006: 32−47. [15] 韩云峰, 郑翠娥, 孙大军. 长基线声学定位系统跟踪解算优化方法[J]. 声学学报, 2017, 42(1): 14−20.Han Yunfeng, Zheng Cuie, Sun Dajun. An optimized estimation method in long baseline acoustic positioning systems[J]. Acta Acustica, 2017, 42(1): 14−20. [16] 赵爽, 王振杰, 刘慧敏. 顾及声线入射角的水下定位随机模型[J]. 测绘学报, 2018, 47(9): 1280−1289.Zhao Shuang, Wang Zhenjie, Liu Huimin. Investigation on underwater positioning stochastic model based on sound ray incidence angle[J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(9): 1280−1289. [17] 辛明真, 阳凡林, 闫循鹏, 等. 一种等效声速梯度的迭代计算方法[J]. 海洋测绘, 2015, 35(5): 28−31, 42. doi: 10.3969/j.issn.1671-3044.2015.05.007Xin Mingzhen, Yang Fanlin, Yan Xunpeng, et al. An equivalent sound velocity profile iterative algorithm[J]. Hydrographic Surveying and Charting, 2015, 35(5): 28−31, 42. doi: 10.3969/j.issn.1671-3044.2015.05.007 [18] 赵荻能, 吴自银, 周洁琼, 等. 声速剖面精简运算的改进D-P算法及其评估[J]. 测绘学报, 2014, 43(7): 681−689. doi: 10.13485/j.cnki.11-2089.2014.00Zhao Dineng, Wu Ziyin, Zhou Jieqiong, et al. A method for streamlining and assessing sound velocity profiles based on improved D-P algorithm[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(7): 681−689. doi: 10.13485/j.cnki.11-2089.2014.00 [19] Zheng Gen, Zhao Jianhu, Zhang Hongmei. An adaptive SVP simplification based on area difference[J]. Journal of Geodesy and Geoinformation Science, 2019, 2(4): 53−63. [20] 辛明真, 阳凡林, 薛树强, 等. 顾及波束入射角的常梯度声线跟踪水下定位算法[J]. 测绘学报, 2020, 49(12): 1535−1542.Xin Mingzhen, Yang Fanlin, Xue Shuqiang, et al. A constant gradient sound ray tracing underwater positioning algorithm considering incident beam angle[J]. Acta Geodaetica et Cartographica Sinica, 2020, 49(12): 1535−1542. [21] 陆秀平, 边少锋, 黄谟涛, 等. 常梯度声线跟踪中平均声速的改进算法[J]. 武汉大学学报: 信息科学版, 2012, 37(5): 590−593.Lu Xiuping, Bian Shaofeng, Huang Motao, et al. An improved method for calculating average sound speed in constant gradient sound ray tracing technology[J]. Geomatics and Information Science of Wuhan University, 2012, 37(5): 590−593. [22] Mary M, William M. An acoustic navigation system[R]. WHOI Technical Reports, Department of Ocean Engineering, Massachusetts, US, 1974. [23] 孙革. 多波束测深系统声速校正方法研究及其应用[D]. 青岛: 中国海洋大学, 2007: 45-68.Sun Ge. This is the application and study on the method of adjusting the sound velocity of the multi-beam bathymetryic system[D]. Qingdao: Ocean University of China, 2007: 45−68. [24] 赵建虎, 刘经南. 多波束测深及图像数据处理[M]. 武汉: 武汉大学出版社, 2008.Zhao Jianhu, Liu Jingnan. Multi-Beam Sounding and Image Data Processing[M]. Wuhan: Wuhan University Press, 2008. [25] Geng Xueyi, Zielinski A. Precise multibeam acoustic bathymetry[J]. Marine Geodesy, 1999, 22(3): 157−167. doi: 10.1080/014904199273434 [26] 吴德明. 一种用于声线修正的迭代法[J]. 声学学报, 1992, 17(2): 104−110.Wu Deming. An iteration method for correcting the located coordinates of an underwater target[J]. Acta Acustica, 1992, 17(2): 104−110. [27] Sun Dajun, Li Haipeng, Zheng Cuie, et al. Sound velocity correction based on effective sound velocity for underwater acoustic positioning systems[J]. Applied Acoustics, 2019, 151: 55−62. doi: 10.1016/j.apacoust.2019.02.027 [28] Yang Fanlin, Lu Xiushan, Li Jiabiao, et al. Precise positioning of underwater static objects without sound speed profile[J]. Marine Geodesy, 2011, 34(2): 138−151. doi: 10.1080/01490419.2010.518501 [29] 王振杰, 李圣雪, 聂志喜, 等. 水声定位中一种大入射角声线跟踪方法[J]. 武汉大学学报: 信息科学版, 2016, 41(10): 1404−1408.Wang Zhenjie, Li Shengxue, Nie Zhixi, et al. A large incidence angle ray-tracing method for underwater acoustic positioning[J]. Geomatics and Information Science of Wuhan University, 2016, 41(10): 1404−1408. [30] Xin Mingzhen, Yang Fanlin, Wang Faxing, et al. A TOA/AOA underwater acoustic positioning system based on the equivalent sound speed[J]. Journal of Navigation, 2018, 71(6): 1431−1440. doi: 10.1017/S037346331800036X [31] 辛明真. GNSS-A水下定位与导航关键技术研究[D]. 青岛: 山东科技大学, 2020: 32-50.Xin Mingzhen. Research on key technologies of GNSS-A underwater positioning and navigation[D]. Qingdao: Shandong University of Science and Technology, 2020: 32−50. [32] 梁国龙, 张毅锋, 付进. 利用夹角几何关系的超短基线定位方法[J]. 哈尔滨工程大学学报, 2019, 40(8): 1474−1479.Liang Guolong, Zhang Yifeng, Fu Jin. Angle-based underwater source localization for USBL[J]. Journal of Harbin Engineering University, 2019, 40(8): 1474−1479. [33] 赵培玉, 吴素文, 冯大光, 等. 超越方程的数值计算方法与收敛速度分析[J]. 长江大学学报(自然科学版)理工, 2012, 9(5): 1−2, 5.Zhao Peiyu, Wu Suwen, Feng Daguang, et al. Analysis of numerical calculation method and convergence rate of transcendental equation[J]. Journal of Yangtze University (Natural Science Edition) Science & Engineering, 2012, 9(5): 1−2, 5. -


图(10) / 表(1)
计量
- 文章访问数: 374
- HTML全文浏览量: 239
- PDF下载量: 23
- 被引次数: 0
