

The application of geometric re-definition and sinking depth correction to the marine multi-channel short-array seismic reflection data
-
摘要: 短排列多道反射地震接收缆较短,无水鸟、磁罗经、尾标等定位定深设备,给常规数据处理带来诸如观测系统定义等棘手问题;另外,无定深设备会造成接收缆不同接收段的沉放深度不同,破坏反射数据理论双曲线时距曲线关系。针对短排列多道反射地震数据,本文充分利用现场导航数据,计算实际激发点轨迹,再通过反距离比线性插值算法计算检波点的轨迹坐标,获得整个排列的实际观测系统参数。对因沉放深度不一致造成的扭曲时距曲线反射波,文中利用理论双曲线先计算共中心点道集的理论反射波位置,再推算排列中各接收道不同沉放深度处的静校正量,通过静校正拟合运算,消除接收排列非一致深度引起的反射波同相轴扭曲现象。将上述处理方法应用于南极海域短排列多道反射地震数据,最终获得了高分辨率叠加剖面,为后续地质解释提供了保障。Abstract: Although the length of short array multi-channel streamers is limited,the absence of equipment for positioning and depth fixing, e.g., birds, magnetic compass, tail mark, etc., will bring some problems, such as inaccurate seismic geometric definition, to the subsequent procedure of data processing. In addition, different sinking depths without correction of depth fixing at different receiving sections along the short towing cable will destroy the relationship of the theoretical hyperbolic curve between time and distance. As to the short-array multi-channel seismic reflection data, therefore, we utilize the surveying navigation data to calculate the real shot track points, and then the interpolation algorithm weighted with inverse ratio of distance is employed to estimate the trajectory coordinates of the receiving points, which aids in obtaining the authentic geometric parameters of the total array. In order to resolve the distortion of time-distance curve caused by inconsistent depth of receiving cable, we calculate the theoretical reflecting positions of common mid-point (CMP) with hyperbolic curve and gauge the static correction of receiving arrays with different sinking depths. Finally, distortions of the reflection event caused by the non-uniform sinking depths of receiving array are eliminated by the fitting algorithm of static correction. The application of above processing processes to the short-array seismic reflection data collected in the Ross Sea, West Antarctica produces high-resolution stacked seismic reflection profiles, which provides great technical assistance for following work of geological interpretation.
-

图 4 放炮时间间隔(a)、船速(b)、炮间距(c)随激发点点号变化曲线
Fig. 4 Shot time interval (a), ship speed (b) and shot interval (c) curve of source point number
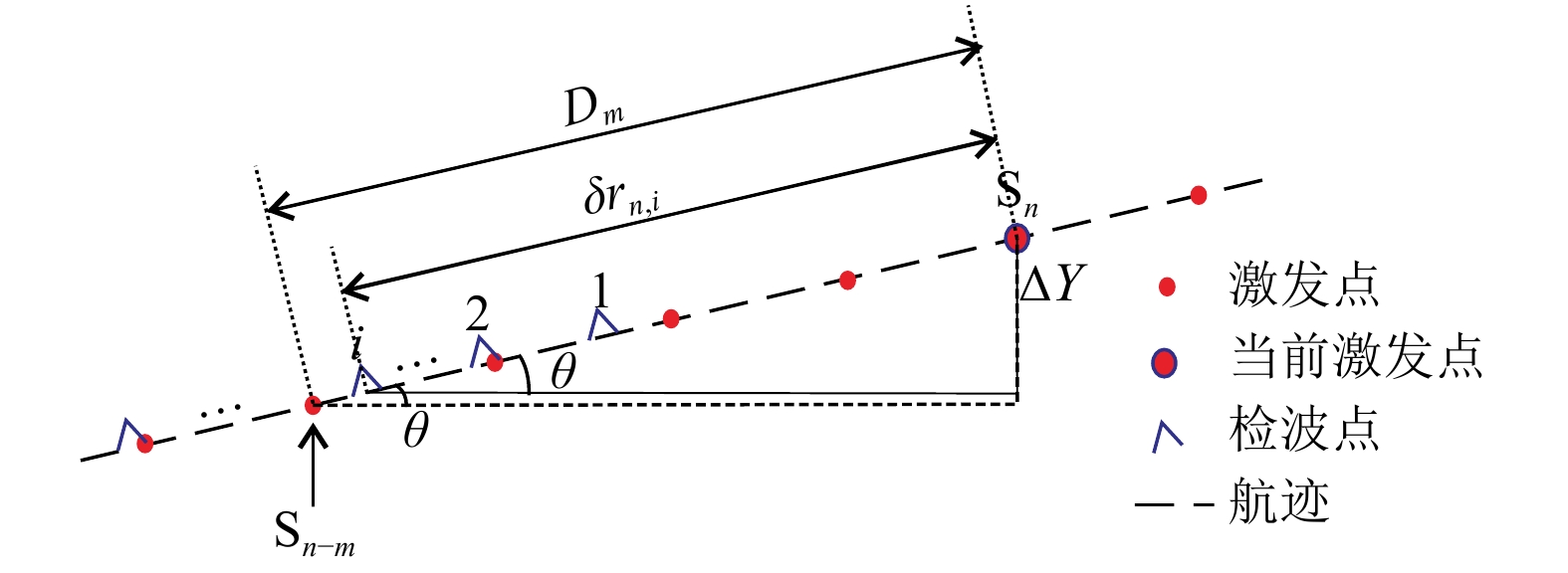
图 5 检波点与激发点间空间位置关系
Fig. 5 Spatial position relationship between the receiving points and the shot points
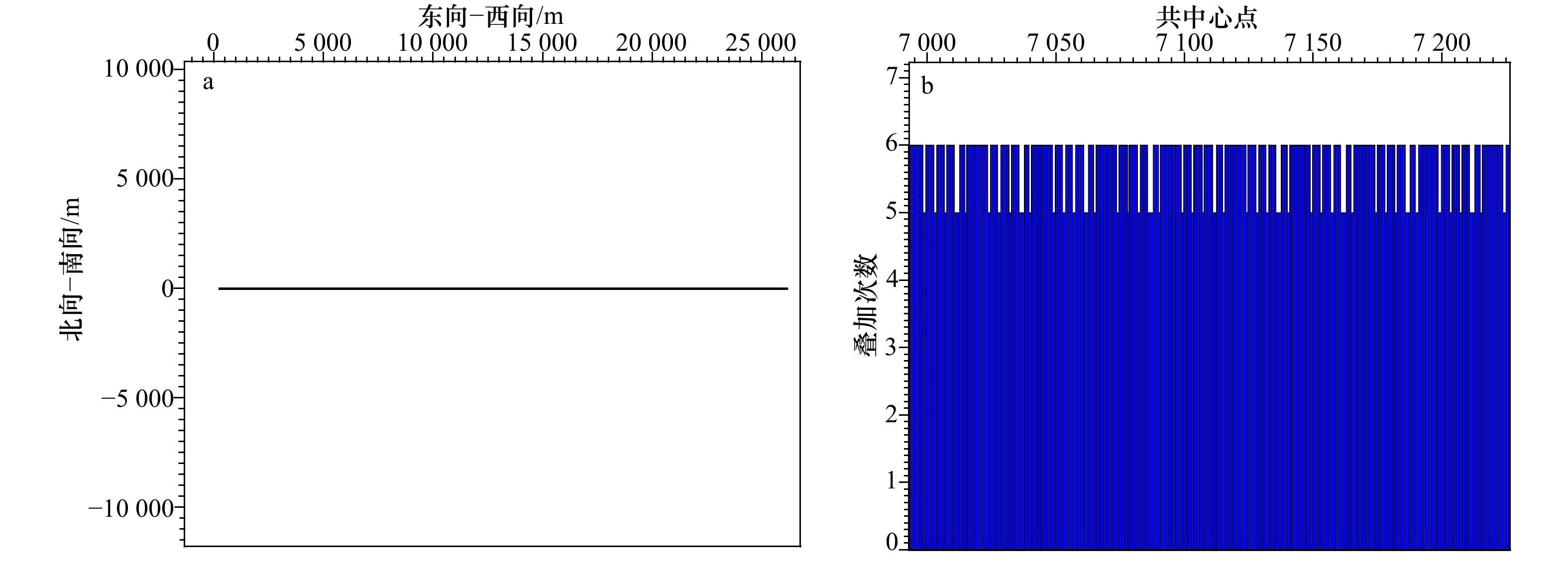
图 6 基于直线假设定义的观测系统共反射点轨迹(a)与叠加次数(b)
Fig. 6 Common reflection point trajectory (a) and the stacking fold (b) of the geometry defined by linear hypothesis
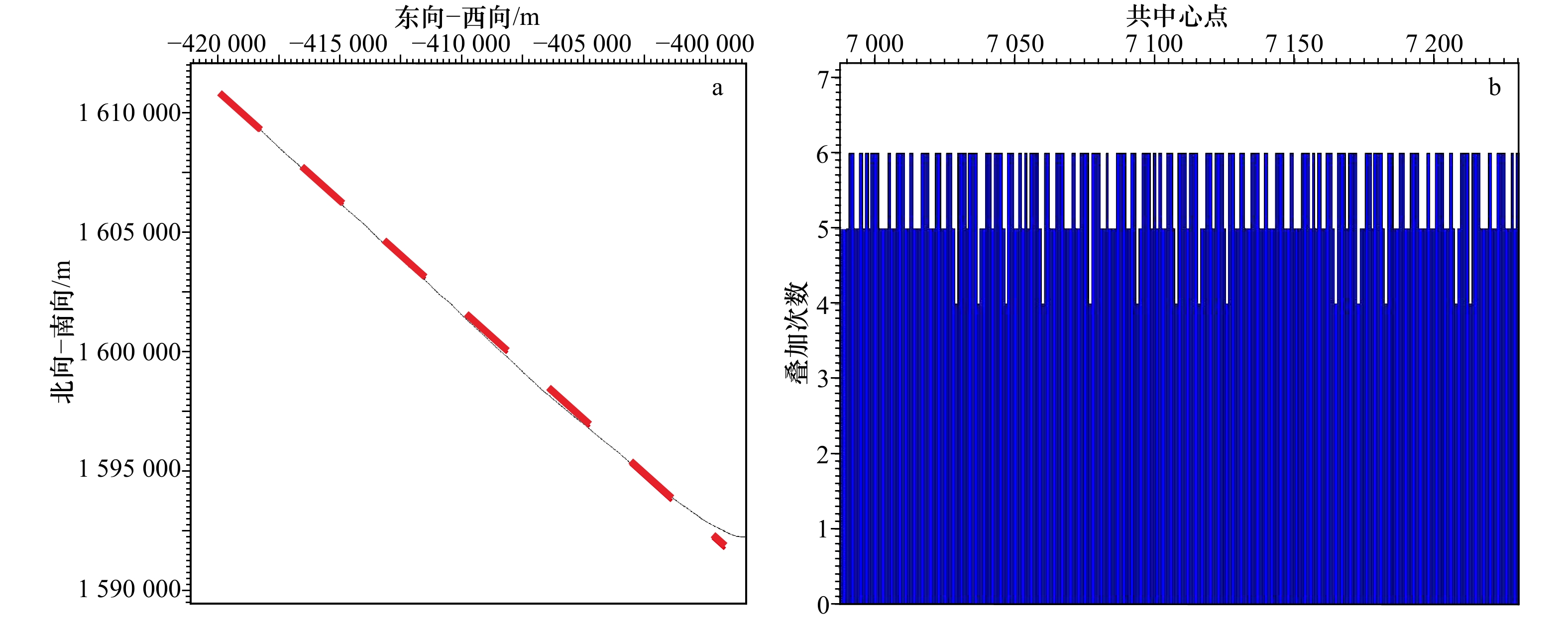
图 7 基于导航数据定义的观测系统共反射点轨迹(a)与叠加次数(b)
Fig. 7 Common reflection point trajectory (a) and the stacking fold (b) of the geometry based on navigation data
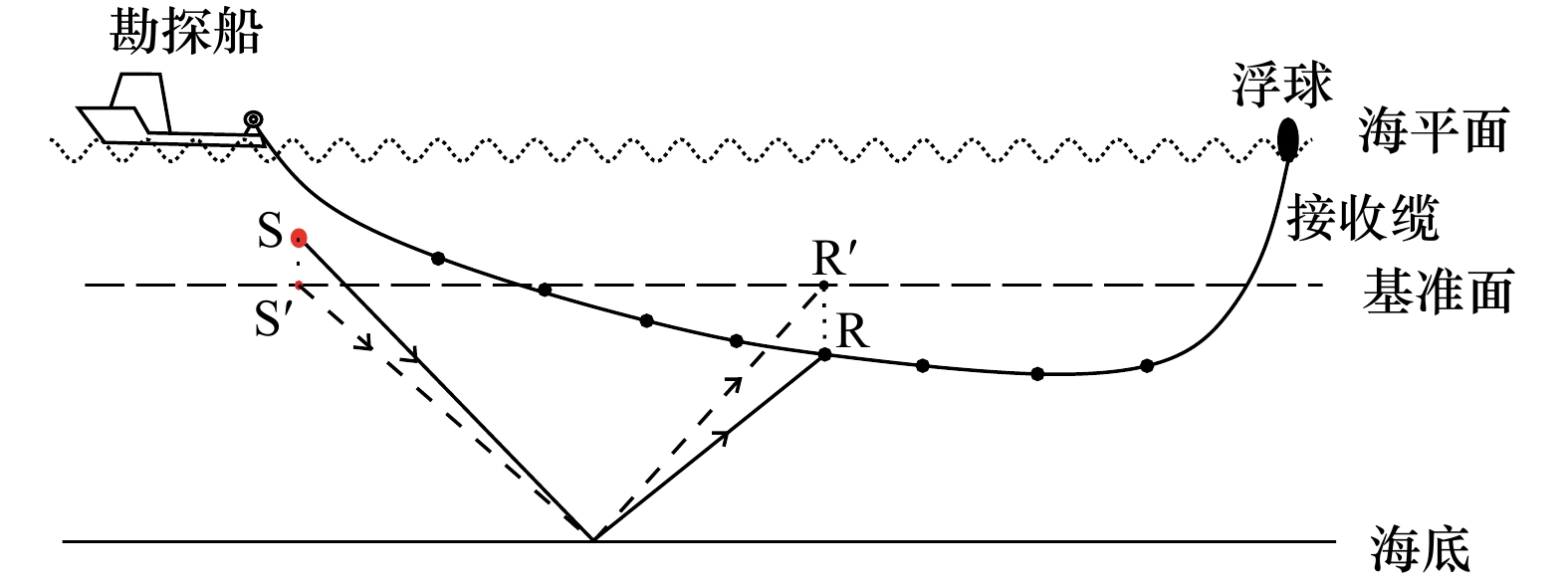
图 8 海洋地震勘探基准面静校正
S表示激发点,R表示检波点;S′,R′表示归算到基准面的激发点、检波点
Fig. 8 Datum static correction of marine seismic exploration
S is the source point, R is the receive point; S′ and R′ are the projection points of S and R onto the datum plane, respectively
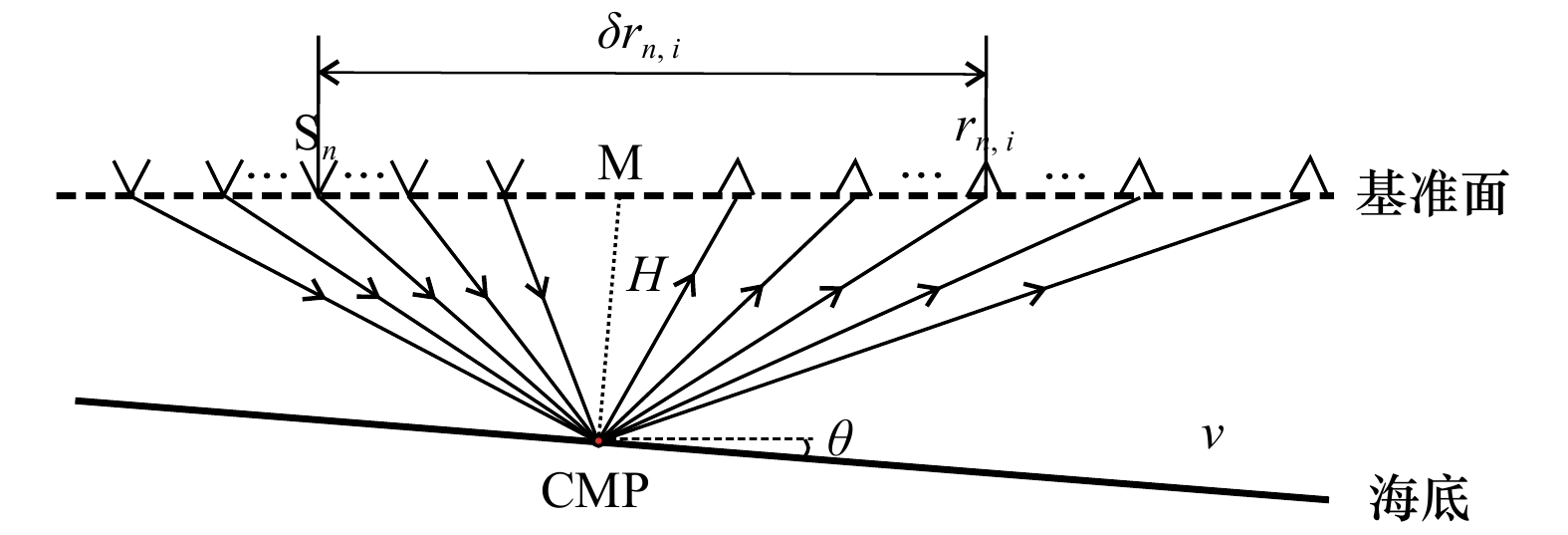
图 9 海洋地震勘探CMP地震波传播示意图
Fig. 9 Schematic diagram of theoretical seismic wave propagation
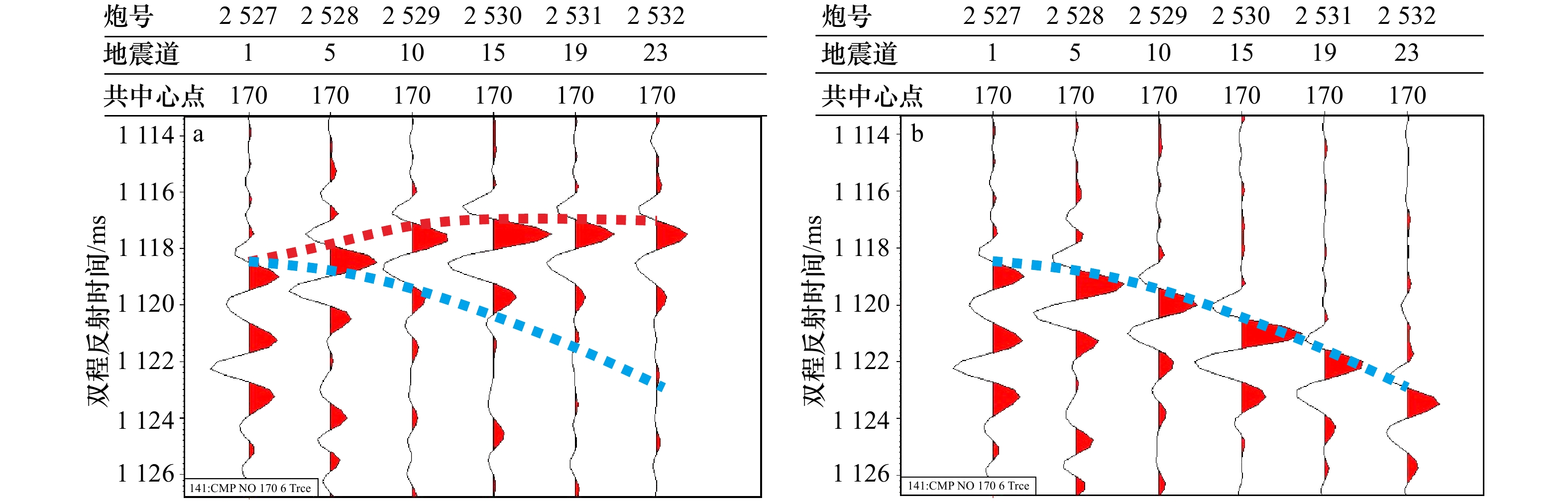
图 10 共中心点道集校正
a图为校正前,b图为校正后,图中红色虚线为海底同相轴实际反射位置,蓝色为理论反射位置
Fig. 10 Common mid-point gather correction
a is before the correction, b is after the correction, the red dotted line represents the real reflection of the bottom, blue dotted line represents the theoretic reflection of the bottom
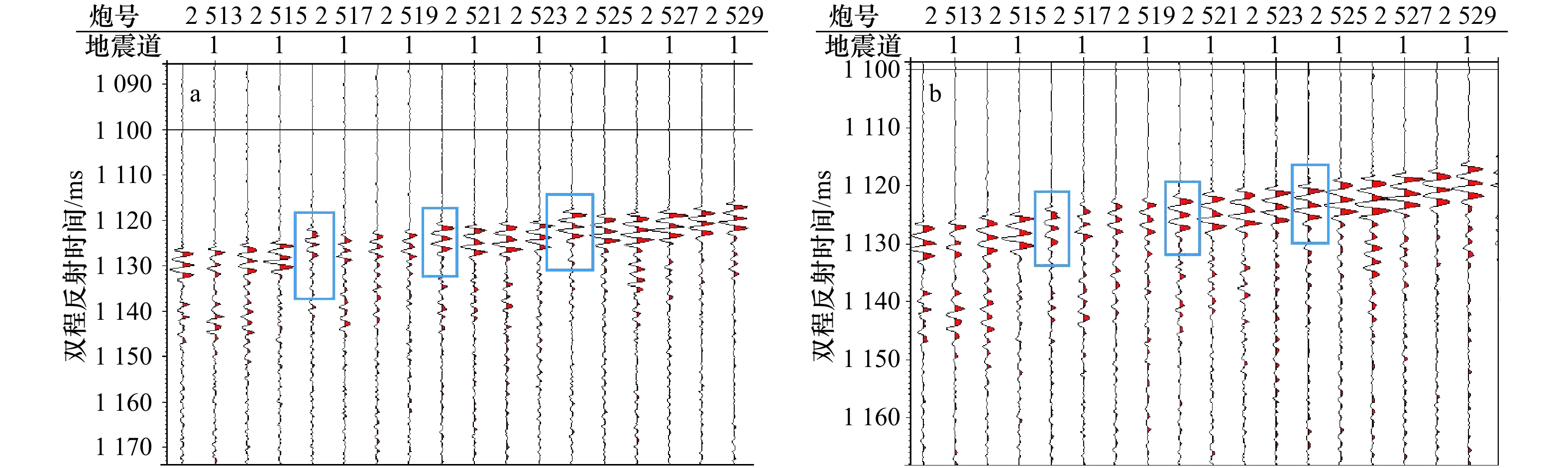
图 11 共炮检距道集校正
a图为校正前,b图为校正后
Fig. 11 Common offset gather correction
a is before the correction, b is after the correction
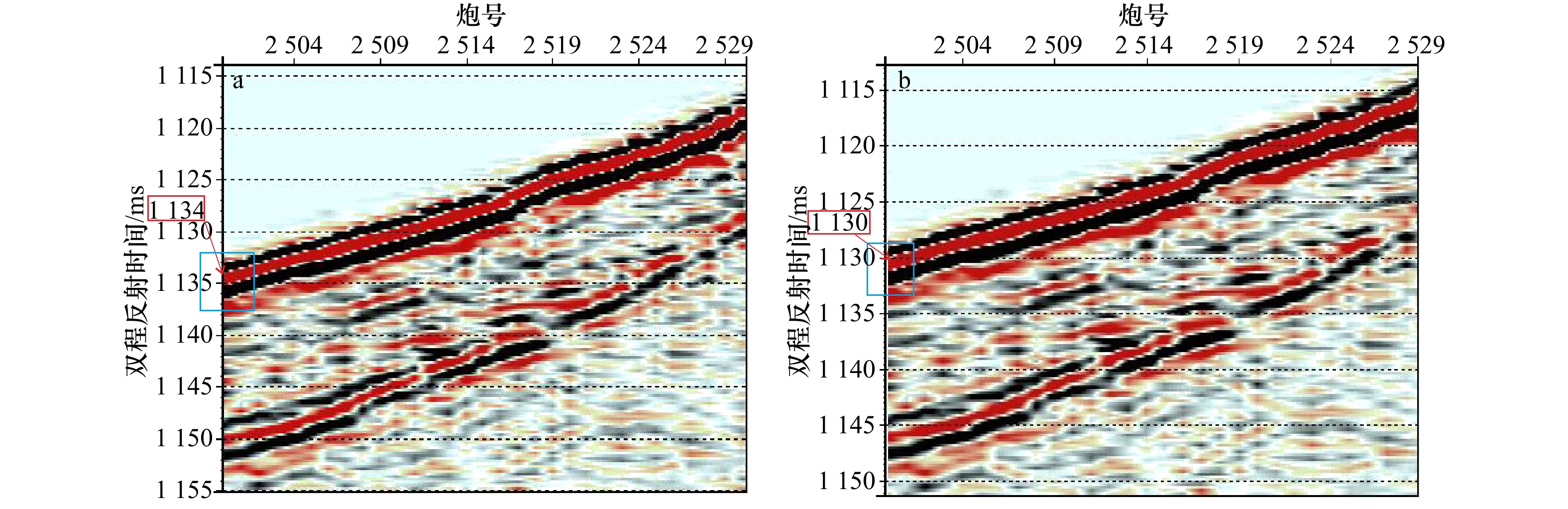
图 12 叠加剖面排列整体深度校正
a图为校正前,b图为校正后
Fig. 12 Stack section alignment overall depth correction
a is before the correction, b is after the correction

图 13 叠加效果分析
a图是基于直线定义观测系统,未做静校正处理前的叠加剖面,b图为经过实际激发点坐标观测系统定义与静校正后的叠加剖面
Fig. 13 Analysis of stack section
a is based on linear definiton observation system, a is the stacked section based on linear-defined geometric system and without static correction; b is the stacked section based on real-position-defined geometric system and with static correction
表 1 海上地震勘探采集参数
Tab. 1 Acquisition parameters for marine seismic exploration
接收道数 道间距 缆长 最小偏移距 放炮方式 24道 6.25 m 200 m 36 m 等时放炮 设计放炮时间 设计船速 采样间隔 震源类型 震源能量 5 s 5 kn 4 000 ms 电火花震源 13 kJ 注:震源采用震源筏,沉放深度为0,拖缆沉放深度不一致。  下载: 导出CSV
下载: 导出CSV
-
[1] 孟庆生, 楚贤峰, 郭秀军, 等. 高分辨率数据处理技术在近海工程地震勘探中的应用[J]. 地球物理学进展, 2007, 22(3): 1006−1010. doi: 10.3969/j.issn.1004-2903.2007.03.053Meng Qingsheng, Chu Xianfeng, Guo Xiujun, et al. The application of high resolution seismic data processing technique in multi-channel shallow offshore engineering seismic surveys[J]. Progress in Geophysics, 2007, 22(3): 1006−1010. doi: 10.3969/j.issn.1004-2903.2007.03.053 [2] 朱洪昌, 朱莉, 玄长虹, 等. 运用高分辨率地震资料处理技术识别薄储层及微幅构造[J]. 石油地球物理勘探, 2010, 45(S1): 90−93, 129.Zhu Hongchang, Zhu Li, Xuan Changhong, et al. Application of high resolution seismic data processing technique to identify thin reservoir and subtle structure[J]. Oil Geophysical Prospecting, 2010, 45(S1): 90−93, 129. [3] 杨文达, 刘望军. 海洋高分辨率地震技术在浅部地质勘探中的运用[J]. 海洋石油, 2007, 27(2): 18−25. doi: 10.3969/j.issn.1008-2336.2007.02.005Yang Wenda, Liu Wangjun. Marine high-resolution seismic techniques applying in the geological exploration of shallow strata[J]. Offshore Oil, 2007, 27(2): 18−25. doi: 10.3969/j.issn.1008-2336.2007.02.005 [4] 王海平, 张伟, 李春雷, 等. 海底浅层地质灾害的高分辨率地震识别技术[J]. 海洋科学, 2014, 38(7): 103−109. doi: 10.11759/hykx20130422003Wang Haiping, Zhang Wei, Li Chunlei, et al. High resolution seismic identification of seafloor shallow geological hazards[J]. Marine Sciences, 2014, 38(7): 103−109. doi: 10.11759/hykx20130422003 [5] 於国平, 刘党卫, 廖昌忠. 深海地震勘探多缆施工电缆位置控制措施[C]//中国石油学会2013年物探技术研讨会论文集. 保定: 中国石油学会, 中国地球物理学会, 2013.Yu Guoping, Liu Dangwei, Liao Changzhong. Measures for controlling the position of multi-cable construction cables in deep-sea seismic exploration[C]//Chinese petroleum society, Geophysical Technology Seminar. Baoding: China Petroleum Institute, China Geophysical Society, 2013. [6] Ambs L D, Chambers R E. Seismic streamer position control module[P]. [2000-01-04]. U.S.: 6011752. [7] Bittleston S H. Control devices for controlling the position of a marine seismic streamer[P]. [2005-05-05]. U.S.: 20050209783. [8] 王兆国, 程顺有, 刘财. 地球物理勘探中几种二维插值方法的误差分析[J]. 吉林大学学报: 地球科学版, 2013, 43(6): 1997−2004.Wang Zhaoguo, Cheng Shunyou, Liu Cai. Error analysis of several two-dimensional interpolation methods in the geophysical exploration[J]. Journal of Jilin University: Earth Science Edition, 2013, 43(6): 1997−2004. [9] 丁维凤, 李家彪, 高金耀, 等. 浅水无定位拖缆观测系统定义及多次波压制效果分析[J]. 地球物理学报, 2017, 60(9): 3685−3692. doi: 10.6038/cjg20170932Ding Weifeng, Li Jiabiao, Gao Jinyao, et al. Definition of seismic geometry for short non-position receivers and multiples attenuation in shallow water[J]. Chinese Journal of Geophysics, 2017, 60(9): 3685−3692. doi: 10.6038/cjg20170932 [10] 陆基孟. 地震勘探原理[M]. 东营: 中国石油大学出版社, 2009.Lu Jimeng. Principle of Seismic Exploration[M]. Dongying: China University of Petroleum Press, 2009. [11] Dave M. Static corrections—a review, Part Ⅰ, PartⅡ, PartⅢ[J]. The Leading Edge, 1993, 12(1, 2, 3): 43−216. [12] 李丽青, 徐华宁, 舒虎. 涌浪静校正技术在海洋单道地震资料处理中的应用[J]. 物探与化探, 2007, 31(4): 339−343. doi: 10.3969/j.issn.1000-8918.2007.04.015Li Liqing, Xu Huaning, Shu Hu. The application of the wave static correction method to marine single-channel seismic data processing[J]. Geophysical and Geochemical Exploration, 2007, 31(4): 339−343. doi: 10.3969/j.issn.1000-8918.2007.04.015 [13] 罗进华, 潘国富, 丁维凤. 消除涌浪对海底声学地层剖面影响的处理技术研究[J]. 声学技术, 2009, 28(1): 21−24.Luo Jinhua, Pan Guofu, Ding Weifeng. Research on processing technique of eliminating wave-induced distortion effect on sub-bottom profile[J]. Technical Acoustics, 2009, 28(1): 21−24. [14] 丁维凤, 冯霞, 傅晓明, 等. 海上单道地震与浅地层剖面数据海浪改正处理研究[J]. 海洋学报, 2012, 34(4): 91−98.Ding Weifeng, Feng Xia, Fu Xiaoming, et al. Marine wave correction research on single channel seismic data and a subbottom profile[J]. Haiyang Xuebao, 2012, 34(4): 91−98. -


 点击查看大图
点击查看大图
计量
- 文章访问数: 345
- HTML全文浏览量: 167
- PDF下载量: 56
- 被引次数: 0
